姿勢系は、 衛星の姿勢の計測や制御をつかさどるシステムである。 軌道上で衛星がどこを向いてい るか測定したり、指定された方向に 衛星(検出器)を向けたりする機能を受け持つ。衛星によっては、 スラスタと合わせて、軌道・姿勢系となっているケースもあるが、 『ぎんが』の場合スラスタは搭載していないので(つまり、 軌道は変更できない)、単なる姿勢系となる。
姿勢系は、衛星の向きを決定する姿勢計測系と、衛星の向きの維持・変更を 行う姿勢制御系に大別できる。以下、最初に計測系について述べ、 次に制御系について述べる。
『ぎんが』は、軌道上で衛星の姿勢を決めるためのセンサーをいくつか 搭載している。姿勢センサーには、宇宙空間での衛星の向き(絶対姿勢)を 計測するセンサーと、衛星の姿勢の変化を検出するセンサーがある。 絶対姿勢を計測するセンサーとしては、(精度の高い順に)星姿勢計、 太陽センサー、地磁気センサーがある。また、姿勢の変化を検出するセンサー としては、慣性基準装置(ジャイロ)を搭載している。
『ぎんが』衛星では、星姿勢系のデータを使って軌道上で自分自身で姿勢保持の 制御を行う予定であった。 しかし、軌道上で星の同定を自動的に行うことが当初予想されたより難しく、 星姿勢系のデータはもっぱら地上での姿勢決定に使われることになった。 したがって、軌道上での姿勢の保持は、ジャイロのデータのみを使って行われた。 ジャイロにはドリフトがあるので、完全に姿勢を安定化させることは難しいが、 『ぎんが』衛星に要求される姿勢制御精度はあまり高くなかったので、 このやり方で十分実用になった。
『ぎんが』衛星の場合、主観測装置である大面積比例計数管が機械式 コリメータを利用していて、視野が2度×4度(bottom-to-bottom)と広いため、 衛星の姿勢制御としては、数分の1度が達成できれば十分であった。 そこで、比較的簡単に三軸制御が実現でき、非常時にも待避姿勢への移行が 容易なバイアスモーメンタム方式が採用されている。
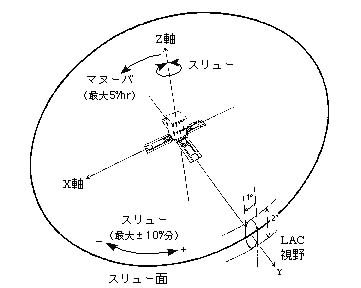
バイアスモーメンタム方式では、Z軸方向に回転軸を持つ モーメンタムホイールが一台搭載され、 このホイールが持つ角運動量で基本的に衛星の姿勢が維持される。 一方、衛星構体には、主に重力傾斜による回転トルクが加わり、 またホイールの軸受けによる摩擦力も加わるので、衛星自身の姿勢を維持する、 つまり、衛星の角運動量を調整する機能が必要である。 これは、磁気トルカによって行われる。
磁気トルカは、単純には電磁石で、地磁場との相互作用により 衛星を回転させる力(トルク)が発生できるようになっている。 磁気トルカによる角運動量調整は、発生トルクが小さくしかも近地球衛星で しか使えないものの(地球から離れるに従い磁場は急激に弱くなるため)、 燃料が不要で構造が簡単という特徴を持つ。
主観測装置である大面積計数管は、Z軸に直行する方向に視野を持っている。 Z軸回りには、ホイールの回転速度を調整することで比較的細かな姿勢制御が できるので、大面積比例計数管の視野も、Z軸に直行する方向には狭くなっている。 また、ホイールの回転速度を上げる(下げる)ことで、衛星をZ軸回りに素早く 回転させることができる(これをスリューという)。 +方向と―方向のスリューを繰り返すことで、空の帯状の領域(例えば 銀河面)のデータを得ることができる。 これが、スキャン観測である。 さらに、スリューにより衛星を一回転させることも可能である。 全天モニタでは、天空を掃く必要があるので、 このやり方で衛星をZ軸回りに一回転させることで (スリュー360°)、全天の観測を 行なっている。
大面積比例計数管を目標とする星に向けるには、衛星自身の姿勢を変える
必要がある(これを、マヌーバという)。
この場合、一般に衛星をZ軸回りに回転させるだけでなく、Z軸方向も変える
必要がある。これには、やはり磁気トルカを使う。しかし、『ぎんが』は、
Z軸方向に大きな角運動量を持っているので、非力な磁気トルカで姿勢を
変えるのは大変で、マヌーバに数時間かかることも珍しくなかった。
衛星の姿勢系に異常事態がおこった場合、たとえば、星姿勢計が星を 見失うとか、宇宙線でコンピュータが暴走するなどした場合、衛星は自動的に 待避姿勢(セーフホールドモード)に移行する。『ぎんが』の場合、 待避姿勢は、Z軸回りのスピン状態である。スピン衛星の姿勢制御は単純で、 コンピュータを使わず簡単なロジック回路で制御できるので、安全な待避姿勢 として使うことができる。 待避姿勢では、当然のことながら(衛星がスピン しているので)X線天体の観測はできない。
人工衛星では、通常太陽電池を使って発電し、 衛星に必要な電力をまかなっている。 しかし、『ぎんが』のような近地球衛星では、1周100分弱のうち、 約30分ほどは地球の影に隠れてしまい、太陽電池が使えない。そこで、 この間はバッテリーに貯えてある電気を使って衛星を稼働させることになる。
衛星の電源系は、日照中は太陽電池からの電気をもとに、
日陰中(衛星が地球の影にいる間)は、バッテリーに貯えてられている電力を もとに、衛星に必要な電源を作って供給している。『ぎんが』衛星で 使われているバッテリーは、ニッケル・カドミウム電池である。 ニッカド電池は、民生品でも幅広く使われているが、一般的な使い方では 充放電できるのは数百回程度といわれている。一方、『ぎんが』のような 近地球衛星では、1日15回、1年では5500回ほど充放電を繰り返すことになる。 したがって、何万回も充放電しても著しい性能劣化がないように、 放電深度をなるべく浅く保ったり温度管理を厳しくするなど、 注意深い運用を行っている。
衛星と地上局の間のコマンドやデータのやり取りをになっているのが 通信系である。
『ぎんが』衛星の場合、地上局は、鹿児島県内之浦町にある宇宙空間観測所 (KSC)だけである。衛星は1日当たり15回地球の周りを回っているが、 そのうちKSCと通信できるのは5周のみであり、通信時間は1周あたり約10分に 限られている。この10分の間に、衛星と地上局の間で通信回線を確保し、 必要なコマンドをすべて衛星に送り、 さらに衛星が取得したデータを地上に転送する必要がある。
この10分間の可視時間の間に送るコマンドは、 記録データの再生のように即座に実行されるコマンドの場合もあるものの、 多くは非可視時間(衛星が受信局から見えない時間)の間に実行するコマンドを あらかじめ衛星にプログラムしておくためのものである。
検出器で得られたX線の観測データや、 衛星上に搭載されている様々な機器の動作状態を表すデータ (house keepingデータ)は、 全てが一定のフォーマットに従って編集され衛星から送出される。 したがって、このデータを受信すれば、 現在の衛星の状態および検出器で得られているX線データが、 その場で時々刻々わかることになる。一方、衛星が非可視の間は、 これらのデータは衛星上のデータレコーダに記録される。この記録データは、 衛星の可視時間の間に再生して地上に送出しなければならない。
『ぎんが』衛星の場合、リアルタイムデータの送出にはUHF帯を使い、 再生データの送出にはSバンドを使っている。
検出器からのX線データや、衛星搭載の様々な機器からの house keepingデータを集めて、定められたフォーマットに従って編集するのが データ処理系の主な役割である。
どういう機器からのデータが重要かは状況によって違うので、 いくつかの異なるフォーマットが用意されている。 たとえば、観測装置に関しては、LACモード、ASMモード、GBDモードなどがある。 また、星姿勢系を始めとする姿勢系からのデータを重点的に編集する ACSモードなどがある。
データの編集は周期的に行われるが、 編集の周期は3段階に切り替えられるようになっている。 言い換えると、この周期を切り替えることで、 衛星から毎秒出力されるデータ量が変化することになる。 3段階は、4秒、32秒、128秒で、 それぞれbit-rate high、bit-rate medium、bit-rate lowと呼ばれている。 Bit rateは高いに越したことはないが、bit-rate highではデータ発生量が高く、 データレコーダが短時間で一杯になるので、 データレコーダの記録可能時間との兼ね合いでbit-rate mediumや lowが選択されることになる。